Moving to a new position
After six years, I will be moving on from INRIA, and join Capital Fund Management, still here in most beautiful Paris.

Wilson R. Jallet, PhD
Quantitative researcher, Capital Fund Management
I am a quantitative researcher at Capital Fund Management (CFM).
I was previously a postdoctoral researcher at INRIA, in the WILLOW project-team. During my PhD, I was between the Willow and Gepetto teams at Inria Paris and LAAS-CNRS respectively, under the supervision of Nicolas Mansard and Justin Carpentier. During both my PhD and post-doc, my work focused on real-time numerical optimization-based control for robotics (and beyond).
I obtained an engineering degree from École polytechnique, and a master's degree in applied mathematics and computer science (MVA) from ENS Paris-Saclay.
Check out my CV here.
After six years, I will be moving on from INRIA, and join Capital Fund Management, still here in most beautiful Paris.
Our paper, PROXDDP: Proximal Constrained Trajectory Optimization, is now available on IEEE Xplore!
I am very happy to announce that our IEEE Transactions on Robotics (T-RO) paper, PROXDDP: Proximal Constrained Trajectory Optimization, has been accepted! This was the main journal paper of my PhD.
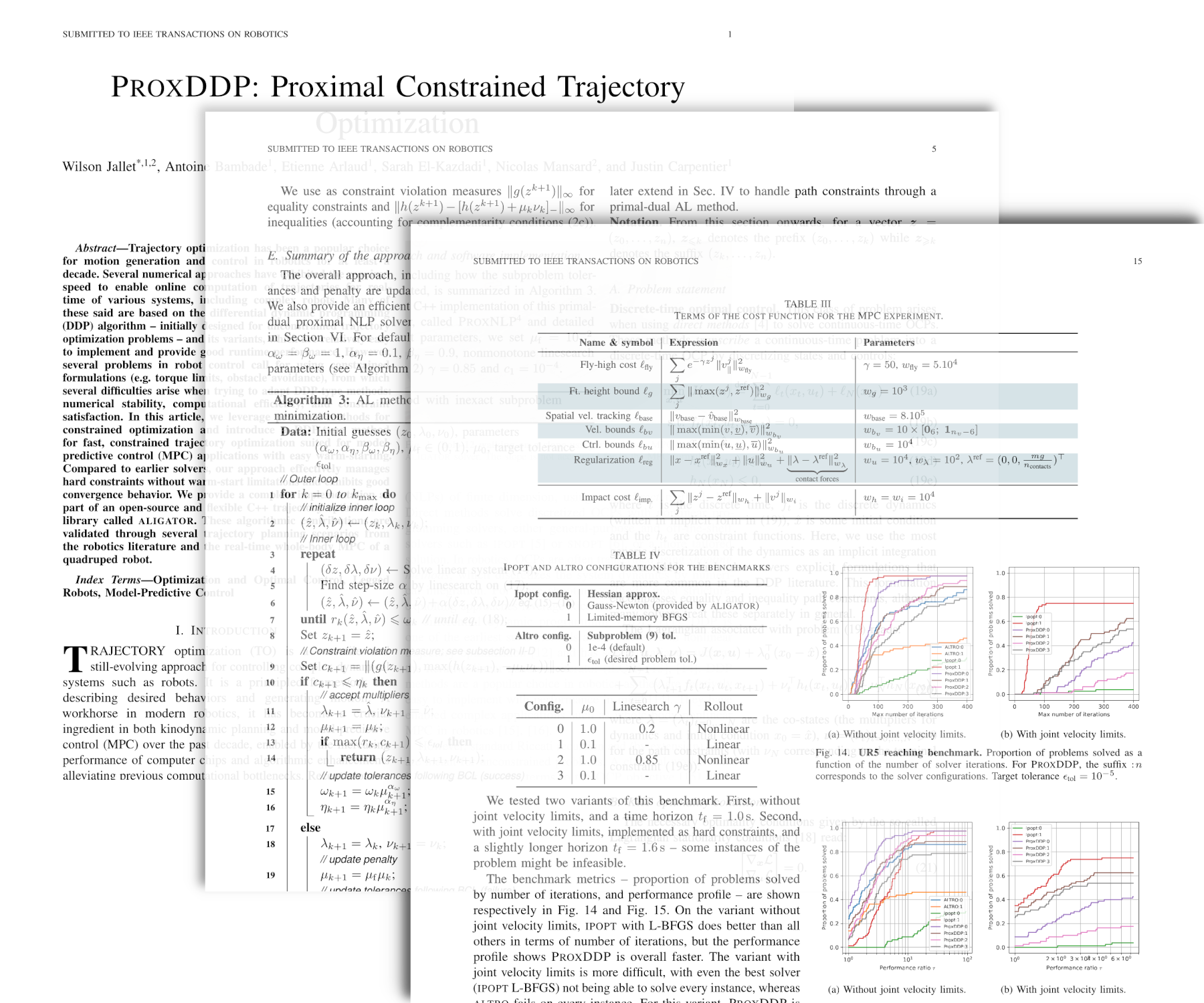
While waiting for it to be published, you can get the latest preprint on HAL here.
Recently, I made public a new repo on GitHub, which is supposed to be a new renderer for robotics applications. It's very much a work in progress, read on for more details on the rationale behind it.
read more →I am officially a doctor, after defending my thesis today.
The presentation was recorded and is available over here at the LAAS peertube: https://peertube.laas.fr/w/gMYL69JAepoZb1cFbYEanF
The slides are available here.
Update 2025/03/06: the final version of the manuscript is available online on HAL.