IEEE T-RO paper accepted
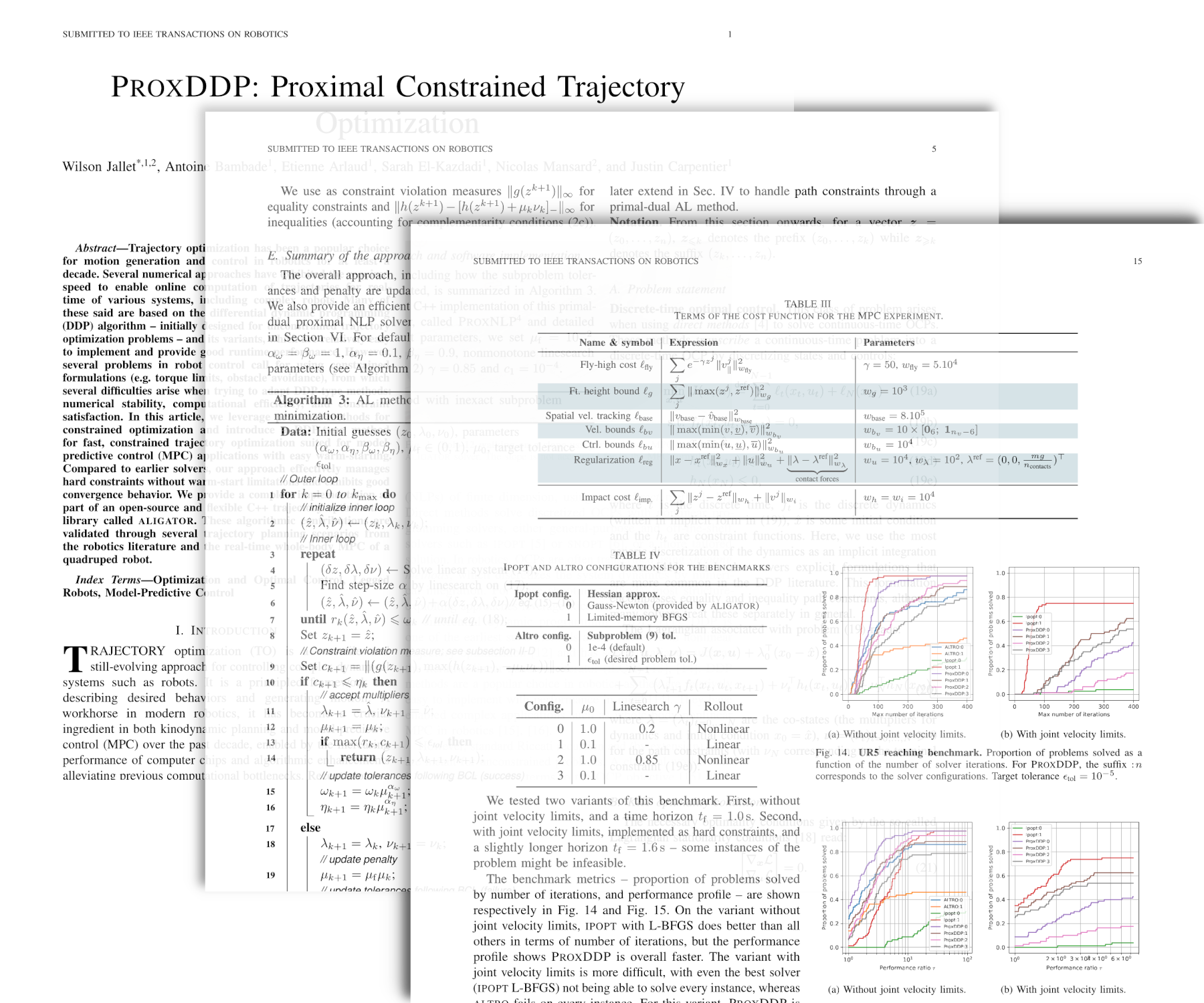
I am very happy to announce that our IEEE Transactions on Robotics (T-RO) paper, PROXDDP: Proximal Constrained Trajectory Optimization, has been accepted! This was the main journal paper of my PhD.
While waiting for it to be published, you can get the latest preprint on HAL here.
Thanks for reading! Read other posts?