Moving to a new position
After six years, I will be moving on from INRIA, and join Capital Fund Management, still here in most beautiful Paris.
After six years, I will be moving on from INRIA, and join Capital Fund Management, still here in most beautiful Paris.
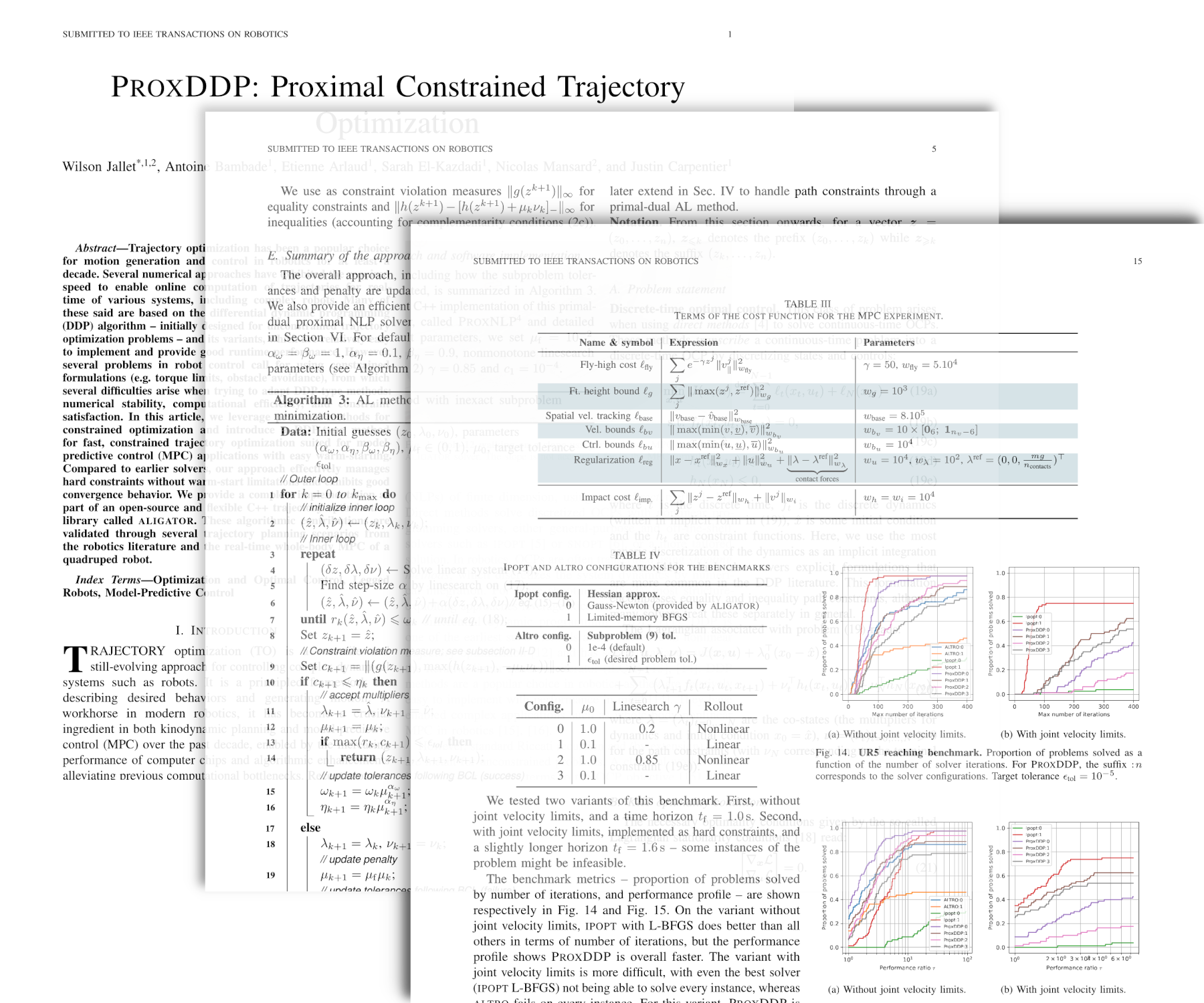
Our paper, PROXDDP: Proximal Constrained Trajectory Optimization, is now available on IEEE Xplore!
I am very happy to announce that our IEEE Transactions on Robotics (T-RO) paper, PROXDDP: Proximal Constrained Trajectory Optimization, has been accepted! This was the main journal paper of my PhD.
While waiting for it to be published, you can get the latest preprint on HAL here.
Recently, I made public a new repo on GitHub, which is supposed to be a new renderer for robotics applications. It's very much a work in progress, read on for more details on the rationale behind it.
read more →I am officially a doctor, after defending my thesis today.
The presentation was recorded and is available over here at the LAAS peertube: https://peertube.laas.fr/w/gMYL69JAepoZb1cFbYEanF
The slides are available here.
Update 2025/03/06: the final version of the manuscript is available online on HAL.
Lie groups are an essential element of modelling in applications such as computer vision and computer graphics (namely handling cameras), and also robotics and machine learning.
They do not constitute an easy subject. A lot of presentation is either overly technical, or glosses over mathematical foundations or properties which enables practitioners to carry out computations on Lie groups by themselves, or understand often unsaid assumptions or conventions in many implementations.
In this blog post, we will be taking a tour of Lie groups, Lie algebras, and useful computational facts.
read more →Our paper From centroidal to whole-body models for legged locomotion: a comparative analysis with Ewen Dantec, has been accepted at the 2024 IEEE RAS Humanoids conference which will take place in Nancy, France in November.
In this paper, we investigate a comparison of using whole-body and two different reduced-order models for nonlinear model-predictive control on bipedal robots, using our optimal control library aligator (which has recently reached 100 stars on GitHub!)
We will be there in November to present our work, and perhaps more 😃
Check out the preprint here 📑
Our paper Parallel and Proximal Linear-Quadratic Methods for Real-Time Constrained Model-Predictive Control has been accepted at Robotics: Science and Systems (RSS) 2024!
It introduces a parallel direct method for solving the regularised linear system for the Newton step in either augmented Lagrangian or interior-point methods for nonlinear MPC.
I will be in Delft this week for the presentation on Tuesday morning.
Check it out here from the programme.
We have released our nonlinear trajectory optimization library aligator.
Check out the repo here.
We have publicly released our nonlinear programming library proxsuite-nlp.