Transactions on Robotics (T-RO) paper online
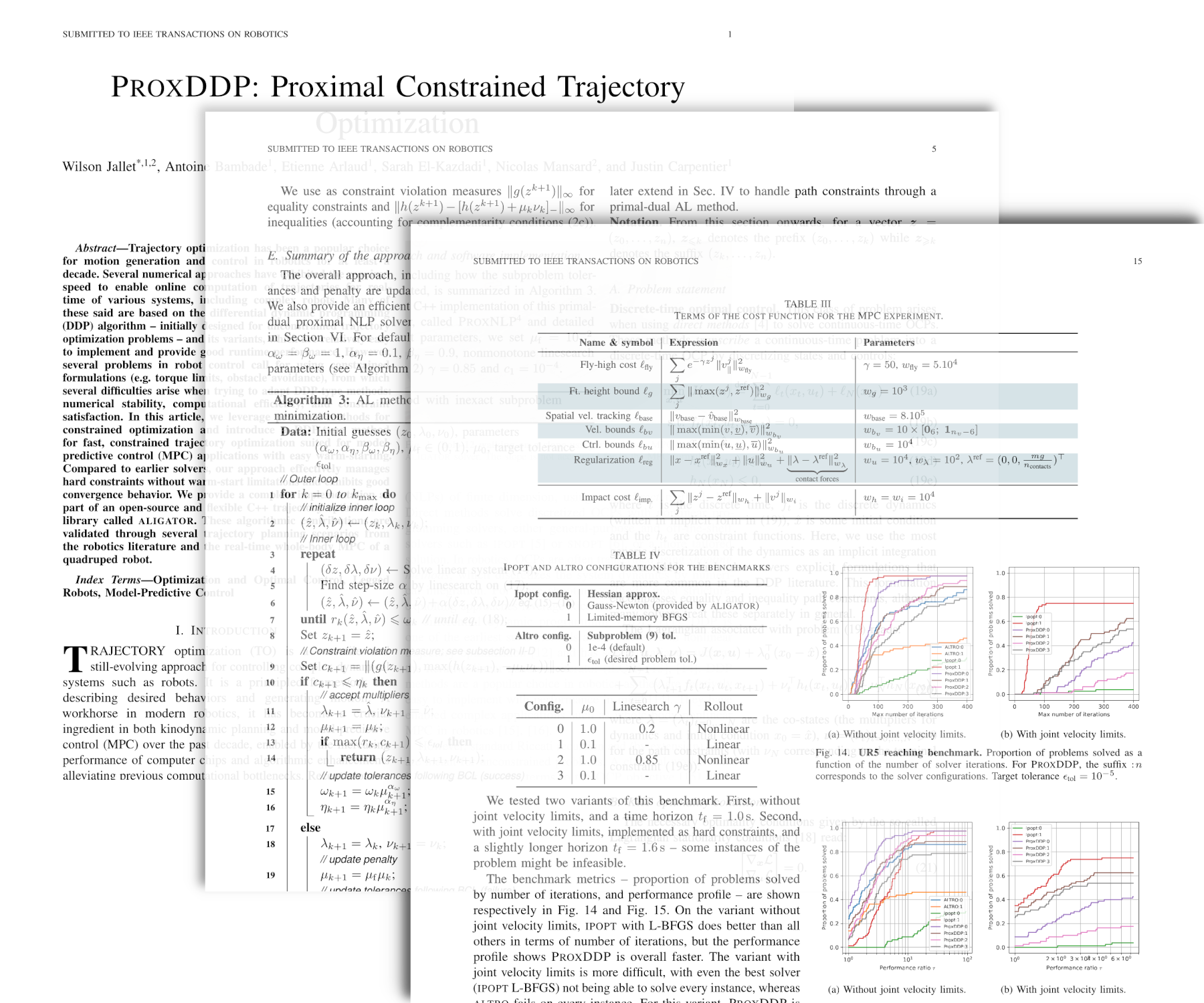
Our paper, PROXDDP: Proximal Constrained Trajectory Optimization, is now available on IEEE Xplore!
Our paper, PROXDDP: Proximal Constrained Trajectory Optimization, is now available on IEEE Xplore!
I am very happy to announce that our IEEE Transactions on Robotics (T-RO) paper, PROXDDP: Proximal Constrained Trajectory Optimization, has been accepted! This was the main journal paper of my PhD.
While waiting for it to be published, you can get the latest preprint on HAL here.
Recently, I made public a new repo on GitHub, which is supposed to be a new renderer for robotics applications. It's very much a work in progress, read on for more details on the rationale behind it.
read more →Our paper Parallel and Proximal Linear-Quadratic Methods for Real-Time Constrained Model-Predictive Control has been accepted at Robotics: Science and Systems (RSS) 2024!
It introduces a parallel direct method for solving the regularised linear system for the Newton step in either augmented Lagrangian or interior-point methods for nonlinear MPC.
I will be in Delft this week for the presentation on Tuesday morning.
Check it out here from the programme.
We have released our nonlinear trajectory optimization library aligator.
Check out the repo here.